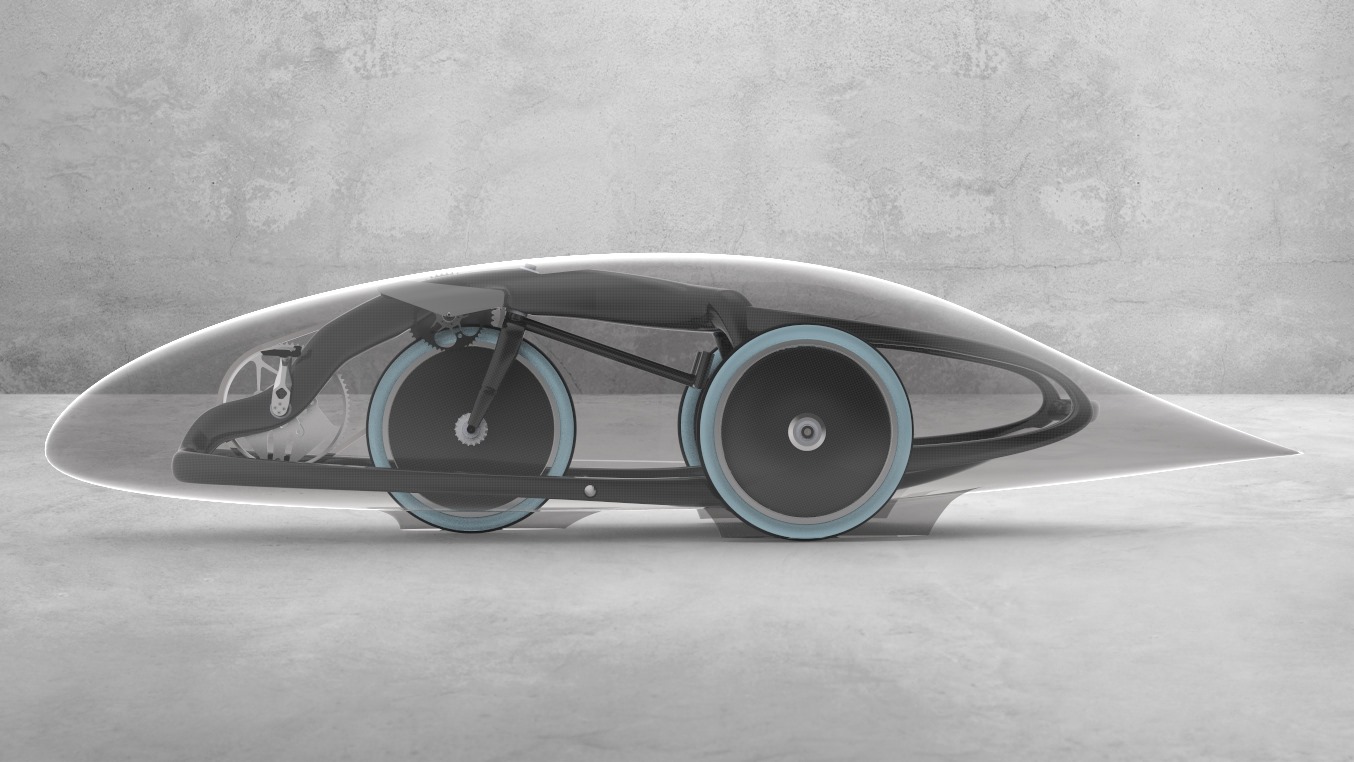
Zephyr
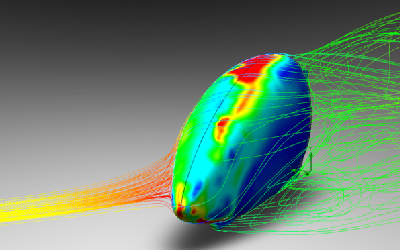
A new take on the most common human powered vehicle in the world: the upright bicycle. Zephyr uses partial aerodynamic fairings fore and aft of the rider's body to provide a 22% drag reduction relative to a standard aerobar position. This vehicle dominated all the races at ASME HPVC North 2019, lapping the second place vehicle seven times during the endurance race. To demonstrate real world usability, the vehicle completed a 350 km 3 day tour from Toronto to Kingston during summer 2019.
Project Director: Bill Kong
Competitions: ASME North 2019 (1st Endurance, 1st Men's Speed, 1st Women's Speed, 4th Design, 2nd Overall)
Start: Fall 2018
Completion: Spring 2019
Dimensions (L×W×H): 217 cm × 48 cm × 133 cm
Mass: 11.5 kg (with fairings), 9.5 kg (bike only)
Top Speed: ~60 km/h at ASME 2019
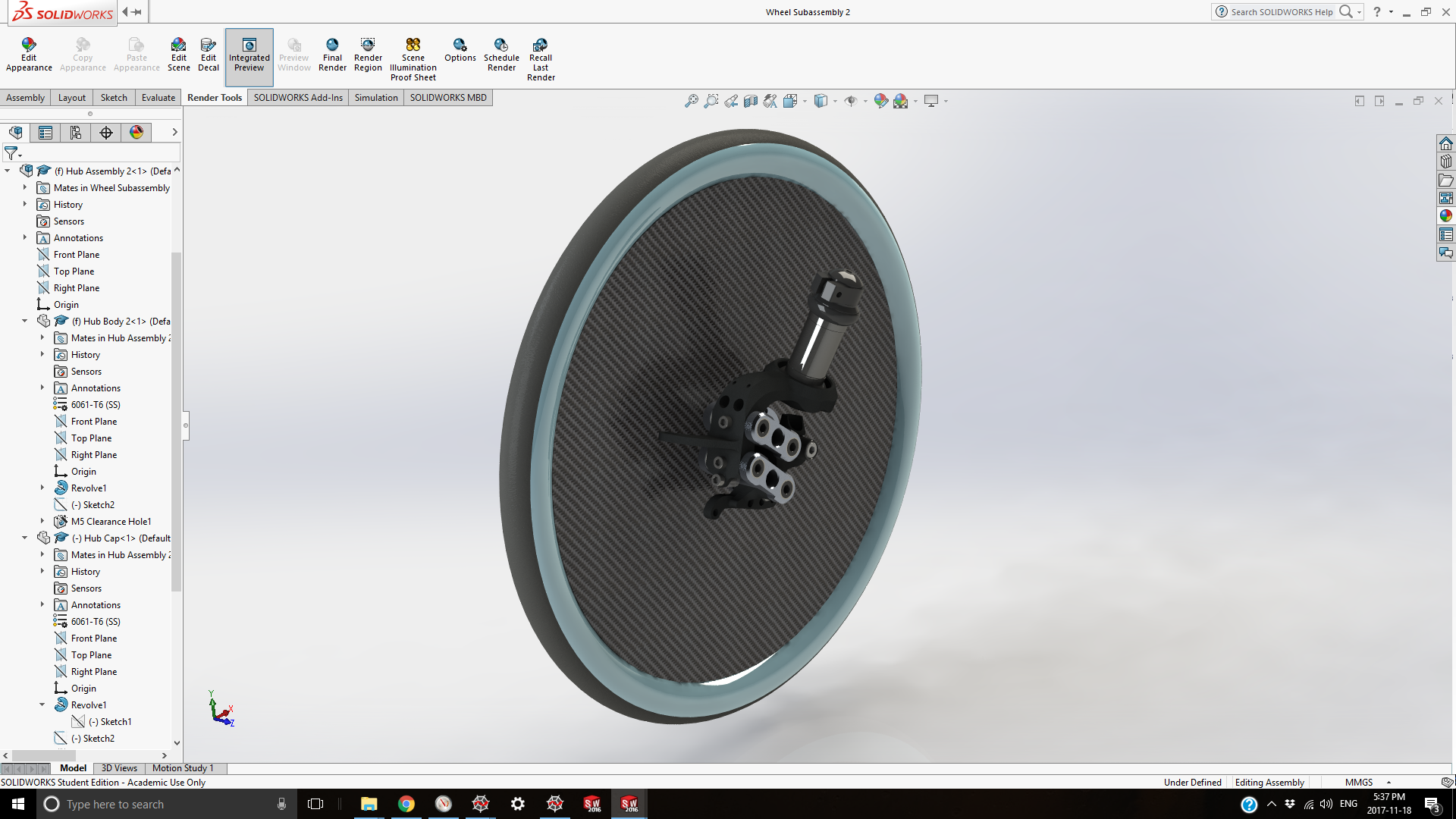
Structure: Prepreg carbon monocoque main frame with carbon wrapped foam core stays, and aluminum dropouts and head tube
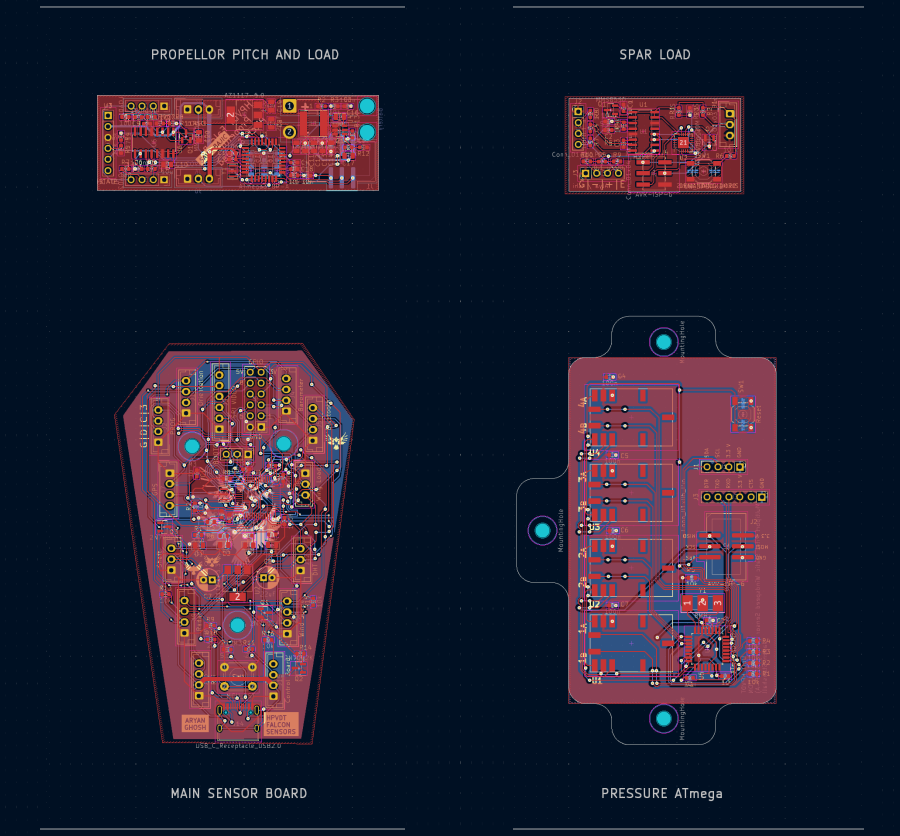
Features: Partial front and rear aerodynamic fairings, wide range of ergonomic adjustability, deep section front wheel, integrated power meter, standard component compatibility